Nゲージを自作デバイスからコントロールしたいと思い、制御回路を作成した。
Nゲージは通常、パワーパックと呼ばれるものを接続して走行させる。これを、自作のデバイスからコントロールしたいと考えた。制御回路の部分さえ作ってしまえば、好きな形でコントローラを作って接続することもできるし、制御プログラムを組んで走行させることもできる。
仕組みとしては単なるモーター制御であり、ドライバICを使うなら簡単な回路なので、実際に作成してみた。
構成
プリント基板を作成した。今回は2枚構成である。ケースに入れることを考慮し、電源スイッチやLEDが前面にまとまるようにして、制御回路の部分をもう1枚の基板にまとめた。
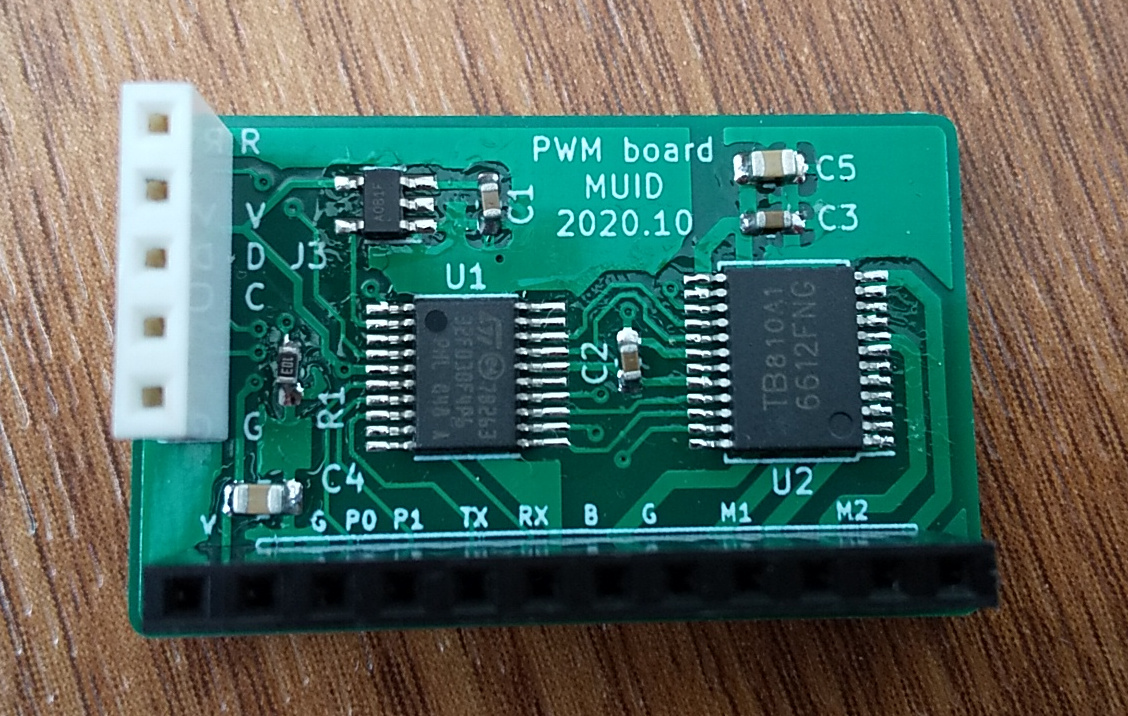
こちらが制御回路の方で、中心となるのはモータードライバIC、TB6612FNGである。FETなどで組むとなかなか大変なので、素直に専用ICを使う。PWMでの制御が必要になるので、STM32マイコンを使って制御している。


こちらが前面にくる基板。裏面のピンコネクタのところに制御回路基板を挿して使う。
電源は乾電池6本を想定していて、ニッケル水素なら7.2V、アルカリ電池なら9Vとなるはずである。ここからレギュレータで3.3Vを生成し、デジタル系の電源としている。降圧が大きいので、一応スイッチングレギュレータのモジュールを使用した。
インターフェイス
外部との接続にはUARTの入出力コネクタが出ている。任意のデバイスからUART信号でコントロールすることができる。
細かい通信内容等はまた別途紹介したいと思う。基本的には、回転方向と出力の強さをコマンドで指定している。また、現在の出力状態をフィードバックするようにした。
テスト
実際にNゲージに接続して動作テストを行った。既製品のフィーダー線路のケーブルを改造し、コネクタに接続できるようにした。コントローラは、スイッチ等を適当に組み合わせて作成した。いずれコントローラ部分も基板を作成し、全体をケースにまとめる予定である。
結果としては、問題なく走行させることができた。実は既製品のパワーパックを持っておらず、速度の比較ができない。最高速はもう少し欲しいかなという感じなので、乾電池は8本の方が良いかもしれない。